Project Overview
Weyland-Yutani Corporation has brought innovation to the interstellar mining industry for centuries. However a recent distress call from Planet LV-210 in the Throton Galaxy indicates one near surface mines has collapsed, and a quick response rescue team needed to save the trapped miners. The ME218c team in conjunction with Waynetech will developed a Basic All Terrain Planetary Observation and Detection System (BATPODS) to bring those miners home safe and sound.
Project Description
Our BATPOD consists of a Remotely Operated Aids for Mine Evacuation and Recovery (ROAMER) and a Personal Operation Datalink (POD). We have developed a Solar-Powered Environmental Camera Interface with Assistive Lamp (SPECIAL) to assist the POD operator to navigate through this alien environment with the ROAMER. Our ROAMER will team up with two other ME218C ROAMERS to rescue the miners in this dark, alien environment with gusting winds, fog, and uneven terrain while being controlled wirelessly with our ME218C POD controllers.
Mission Details

- POD must lead ROAMER to navigate into the mine, locate the airlock, and manually pull off a hatch to gain access to the miners' survival chamber.
- ROAMER must drag each survival chamber to the extraction point in order to save the miners inside.
- Any ME218C team POD can control the LymaKnight ROAMER
- Our LymaKnight POD can control any ME218C team ROAMER.
- For more details on this critical mission, please follow this official distress call and description.
Our Design Strategy:
The LymaKnight BATPOD design is clean and most practical for this time intensive mission. To keep the operators at mission control calm, our POD controller operates like a rocketship/plane/spaceshuttle cockpit with a steering wheel, pedals, with a panel of status outputs and controller inputs to precisely maneuver the ROAMER. The ROAMER has a rugged, 4WD, reliable body that can handle the toughest of environmental conditions and is equipped with a strong gripper to help pull the miner chamber to safety. This website describes the LymanKnight BATPOD system and how we design, build, and integrate wireless communication, mechanical, electrical, and software together to create this rescue platform- this includes the POD and the ROAMER. Our BATPOD, in total, uses four stand-alone µcontrollers (MC9S12E128, MC9S12C32, 2 Pic16F690), two Xbee modules, and the SPECIAL camera. It runs off of four 7.2V NiCad Batteries and communicates commands and status messages with a unique to ME218C protocol that is easy to use and in the language that aliens can't understand - HEX.
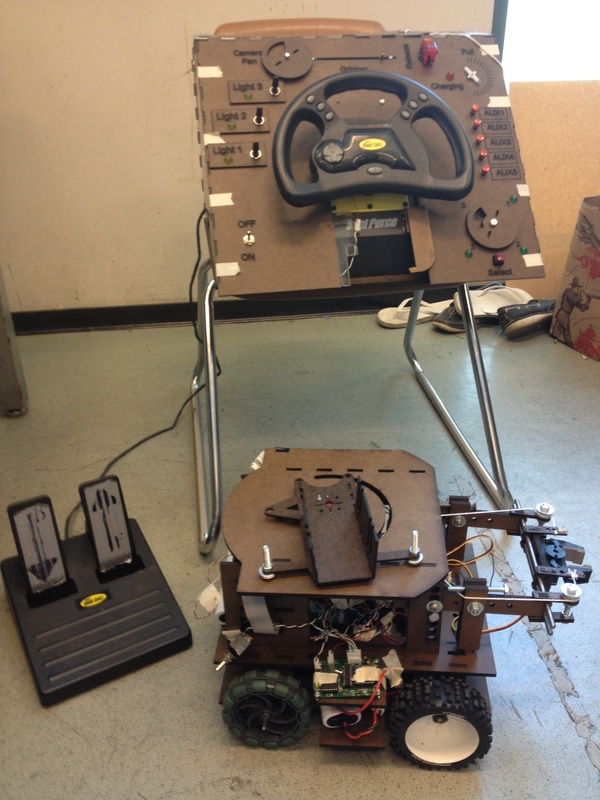
The overview of Team LymaKnights' POD and ROAMER (SPECIAL module is not included)
UPDATE: MISSION SUCCESS - May 30th, 2013

The Miners were rescued! Still unsure about these Aliens....

{kind=link}